








智东西(公众号:zhidxcom)
作者|许丽思
编辑|漠影
一台机器人,昨天还在仓库里熟练地分拣包裹,今天换了个货架就懵了,这是眼下不少机器人面临的尴尬处境:稍微改变一下工作环境,机器人的干活能力就像失效了一样,没法举一反三。
这背后折射出的,正是主流VLA路线的局限性:VLA曾被视作通往通用机器人的关键路径,但越来越多人意识到,其在面对物理世界千变万化的实时交互时,显得力不从心,泛化能力有限,难以举一反三。
在这样的背景下,一家成立于2025年的上海创企眸深智能独辟蹊径,沿着生成式路线打造机器人原生通用大脑,该公司也是全球首家生成式通用具身大脑公司。
眸深智能由三位复旦校友联手创办:首席科学家陈涛为复旦教授、原华为海思AI图像算法引擎负责人,CEO穆泽林是连续创业者,张益民为英特尔中国前首席科学家及英特尔首席工程师,掌舵工程与架构。
“眸深”这个公司名字背后,也带着团队对具身智能的理解:英文源于团队核心技术的“Motion GPT”(动作生成大模型),中文“眸”代表以视觉为基石,让机器人手眼并用,真正在物理世界动起来。
独特技术路线、完备且资深的团队让眸深智能受资本青睐,今年1月,该公司刚连续完成数千万人民币天使轮追加投资,由上海国和投资领投。穆泽林在接受智东西专访时透露,该公司基本上每个月都会交割一轮融资。
眸深选择对标美国Skild AI,这两家公司的产品思路都强调“一脑多形”,只是技术范式和能力重点有所不同。眸深智能的终极目标,是要成为“具身智能时代的Windows”,打造市值千亿以上的通用大脑平台。
一、复旦“铁三角”联手创业,要让机器人真正在物理世界动起来
眸深智能的诞生,源于CEO穆泽林对更大机会的追寻,以及首席科学家陈涛将学术成果落地为产业价值的渴望。
穆泽林有着丰富的创业经历,曾创办了聚焦于AI外呼领域的木心智能。在成功将木心智能做到年营收过亿后,他敏锐地看到了业务的天花板,选择卖掉公司,继续在AI领域寻找一个能做十年、二十年的方向。
陈涛的动机则更像一个学者对产业化的主动转身。他曾任职华为新加坡中央研究院、现任复旦大学教授。在长期的学术研究过程中,他觉得,高校科研与产业结合度低,难以将成果落地,应该要借助产业资源将原创理论落地;反过来,真实场景中遇到的挑战还可以倒逼高校研究更有针对性。
事实上,两人早在2019年就已经有过共同创业的念头。只是当时陈涛刚从海外和企业回到复旦,科研平台刚起步,还不适合马上投入创业。
直到2023年ChatGPT出现后,创业的想法经过几年的沉淀后终于开始走向落地,两人决定聚焦具身智能模型的相关领域。
团队“铁三角”的补齐,得益于前英特尔中国首席科学家张益民的加入。张益民与穆泽林、陈涛同是复旦校友,是前英特尔中国研究院首席科学家及英特尔首席工程师,原机器人交互实验室高级总监,从2015年起负责服务机器人研发。
至此,眸深智能形成了“模型算法+商业化+工程架构”的互补组合:穆泽林负责商业化与组织,陈涛主导模型算法,张益民补上工程与架构。
据了解,眸深智能的团队规模并不大,全职员工不到20人。但其背后依托着与复旦大学的校企联合研究中心,拥有一支60余人的强大博士研究团队。这种“小型公司+大研究院”的结构,构成了它与大部分创业公司不同的组织基础。
具身智能行业迭代速度快,为了平衡短期成功压力与长期基础研究的投入,眸深智能内部形成了独特的“顶天+立地”的双线研发阵型。
“顶天”的研究由高校联合实验室的博士团队负责前沿探索,聚焦从0到1的创新技术研发;而“立地”则偏向于工程化落地,由公司内部的工程师团队结合成熟技术与自研模块,以客户为中心进行交付。这两条线形成闭环,前沿探索为工程落地提供技术储备,工程实践又为前沿研究指明方向。
陈涛谈道,眸深智能在开展研究前期,就通过考察国内外头部机构的研究进展,坚决避开VLA等已过度内卷的同质化赛道,专注于生成式和端侧部署等更具特色的深层研究。
但不碰同质化,不等于闭门造车。眸深同时也秉持兼容并包、取长补短的理念,借鉴外界出色的研究成果优点,并与自研技术融合,在差异化中形成自身特色。更重要的是,团队坚持技术与场景同步推进,不等技术100%成熟才考虑落地,而是主动寻求场景和业务。
二、不走寻常路,坚持生成式是人机互动的理想范式
眸深选择生成式技术路线,根植于陈涛早期形成的技术信仰。
在他看来,AI的终极目标是服务人,人首先需要的是互动的价值,传统模仿学习或预编程机器人缺乏互动性,而生成式是实现人机互动的理想范式。
以ChatGPT为例,生成式模型能够根据人的问题和反馈不断修正和完善自己的回应,这种动态交互的能力正是具身智能所需要的核心特质。
眸深自主研发的全球首个数字人动作生成模型MotionGPT,首创了“动作基元”技术,将复杂的动作序列拆解为上千个基础元素,模型可根据自然语言指令,动态调用并组合这些基元,生成全新的、未训练过的动作序列。
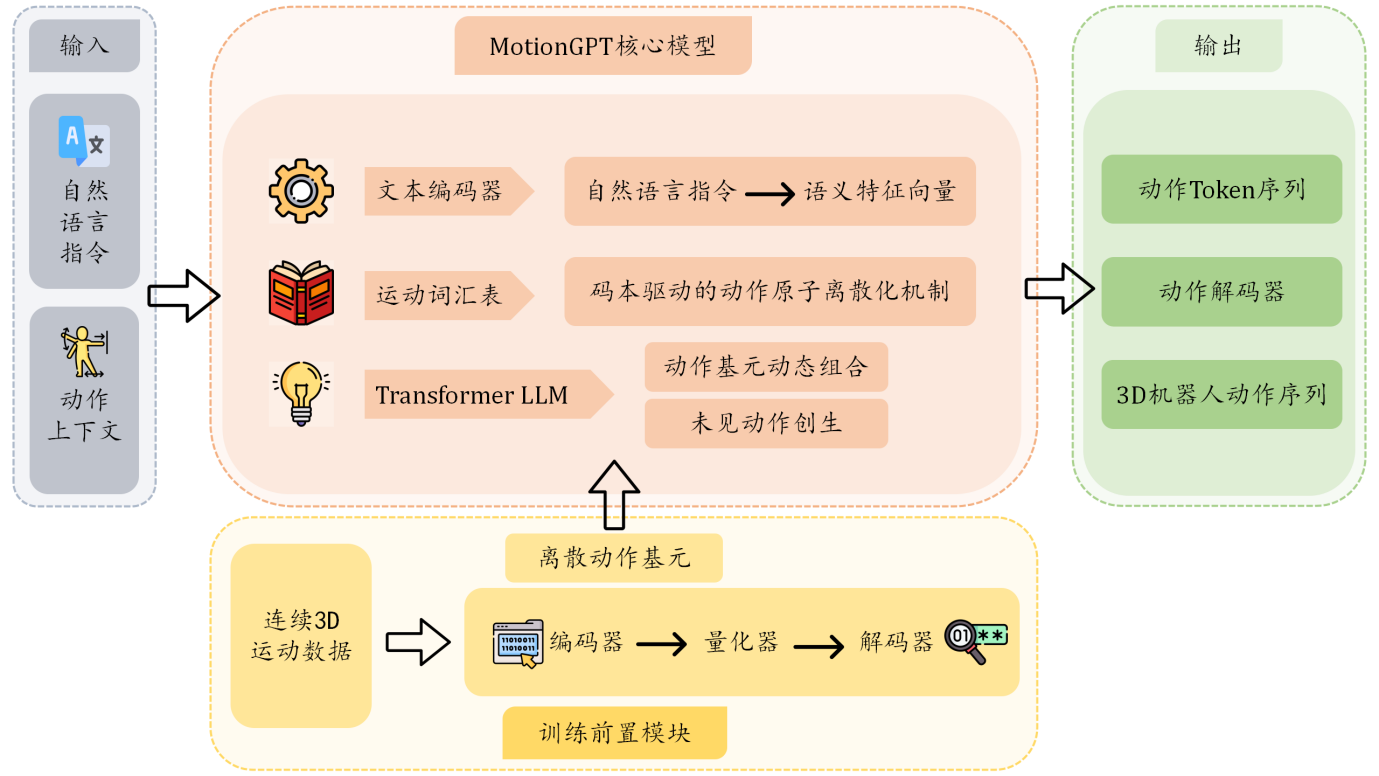 ▲MotionGPT框架图
▲MotionGPT框架图
为了攻克数据瓶颈,眸深开创性地采用了“三段式训练架构”:先用90%的互联网视频让模型理解通用运动规律,再用仿真数据微调适配,最后仅需极少量的真机数据进行强化学习校准,大幅降低了数据成本,提升训练效率。
▲机械臂抓取物体,相比目前最前沿的Pi0.5模型效率高80%
针对互联网视频数据质量参差不齐的问题,陈涛团队还自研了一套半自动的数据筛选、标注以及自动化数据搜索与蒸馏技术,让模型在学习过程中动态选择最适合当前阶段的数据,最后用价值观对齐和真机微调提升模型性能。
在模型轻量化与端侧部署上,眸深研发了全球首个多模态模型轻量化方案MADTP动态令牌剪枝算法,目前已经升级到第三代MADTP++,实现将模型压缩至原来的1/8、推理速度提升10-20倍的效果,实现百亿参数模型在机器人端侧芯片上的高效运行。

▲眸深具身大模型算侧压缩框架获得IJCAI 2025全球最佳论文奖
这个算法能够把模型变“轻”,不仅可以通过压缩,把体量大的模型压到端侧可承载的规模,还能在推理阶段做动态调用,按任务复杂度调动不同参数量,避免端侧每次满负荷运转,从而把算力消耗压到可控区间。
眸深智能还提出了全球首个“世界动作模型(World Motion Model)”。它使机器人拥有理解物理规律和动作原理的通用能力,能够根据外部环境做出实时反应,生成最符合当下环境的动作。
▲多机协同运动演示
归根结底,眸深智能一直坚持生成式路线,瞄准的就是让机器人具备像人一样在交互中理解环境、生成决策并即时行动的能力,这也是机器人真正走出实验室、进入复杂现实场景的核心前提。
三、找准生态位,以原生大脑赋能千行百业落地
当前,不少具身智能项目容易卡在POC或Demo阶段,穆泽林认为,主要有两大原因:一是技术本身泛化性不足,产品难以从示范走向规模化;二是POC设计之初就没有考虑规模化后的节拍、续航、工作寿命等现实问题,一个Demo或许可以忽略这些约束,但现实商业化落地不能。
所以,眸深智能的商业化打法,就是选择那些技术能领先市场6-12个月、容错率较高的领域,作为技术的最佳试验场,逐步实现规模化落地,避免陷入纯技术演示的困境。
围绕这一思路,眸深目前明确聚焦两个垂直方向:工业物流等多场景搬运,以及家庭健康养老。前者重点对应动态避障、多机协同等需求,后者则会从安全监护逐步延伸到肢体辅助等更复杂服务。
在接订单这件事上,眸深智能显得有些克制。穆泽林提到,眸深智能在订单选择上有着清晰的三大标准:只与千亿级以上的产业龙头合作;只合作单一类型有万台以上潜在订单的规模化项目;只投入面向国家重大需求、具有战略意义的领域。不符合标准的订单一概不接,确保资源集中投入到长期价值项目中。
目前,眸深智能的技术已快速进入产业化验证阶段。据了解,该公司在成立第一年就获得了来自宇树科技、国地中心、禾川科技、小米集团等头部客户的青睐,去年已确认三千万元的订单收入。
展望今年,穆泽林对订单增长有明确预期,预计将达到六七千万元,主要增长将来自其核心产品“大脑模组”和ODM机器人出货,目前已签约两家行业龙头企业,将带来数千万元的收入。
穆泽林觉得,具身智能产业将像PC时代和自动驾驶时代一样走向分工协作,机器人本体长期将是多种物理拓扑结构共存,很难由单一结构的机器人适应所有需求。因此,眸深立志成为机器人领域的通用“大脑”供应商,专注赋能下游本体厂商和终端客户。
对于是否会涉足硬件本体,首席科学家陈涛表示,当前阶段将非常专注大脑及端侧模组,打造软硬结合的系统。未来,眸深智能不排除根据特定场景需求,与本体厂商合作DIY定制本体,但不会从头到尾自研机械结构。
结语:破解架构瓶颈,眸深智能以第一性原理为机器人重塑可持续学习的原生大脑
谈及当前影响具身模型为何难以收敛,陈涛认为,关键在于缺乏一个为机器人原生的模型架构。现有模型多从语言模型演化而来,原生能力是时序语言建模,其“基因”注定难以应对具身领域高度非结构化的数据和场景。
具身智能领域好的训练目标,也不应仅仅是预测下一个动作token,而是应该实现对视觉、语言意图和行为动作这三类token的精准预测与深度融合,这才是通往通用物理智能的关键。
所以,具身智能需要专为其打造的原生大脑,根据第一性原理,从机器人操作的本质和物理规律出发来设计模型。同时要能够实现机器人大脑的端侧部署闭环,可以实现像人一样边干边学,在执行的过程中不断提升模型能力,这恰恰是眸深长期以来一直在做的事情。
据了解,未来三年,眸深智能已经有了明确的规划:客户端今年实现10家以上上市公司的战略合作签约,5-6家以上进入小批量产,3家实现规模化放量,并最终在三年内服务约20家头部客户。资本层面,完成3-4轮新的融资,迅速跻身行业头部。
技术上,眸深智能即将发布全球首个人类思维方式的世界模型(HL3DWM),未来将继续致力于减少物理幻觉、增强交互实时性,并进一步升级其生成式架构,朝着测试即训练、在执行中进化的机器人原生大脑迈进。
