








智东西(公众号:zhidxcom)
编译 | 信仪
编辑 | 漠影
智东西1月20日消息,近日,麻省理工学院(MIT)的研究人员进行了一项研究,旨在在机器人身上,复制人类触摸获取物体位置的能力。
研究人员将他们的论文预先发表在arXiv上,强调他们的研发成果可以让机器人仅通过触摸,而无需通过视觉和音频处理,就能与其周围环境进行交互,甚至可以在第一次接触物体时对物体进行准确定位。
一、不依赖外部传感方式,仅通过模拟训练实现物体行为
研究人员之一Maria Bauza 在接受外媒Tech Xplore采访时说:“我们此次研究的方法相比以往的触觉定位工作取得了重要飞跃,因为我们可以不依赖例如视觉等其他任何外部传感方式,也不依赖以前收集的与被操纵物体相关的触觉数据。”
“相反,我们的技术是直接在模拟中训练出来的,机器人能在第一次触摸时就定位物体,这在机器人领域的应用中是至关重要的。”
在现实情况中,数据收集价格高昂,甚至有些数据无法被收集。而由于这个新技术是经过模拟训练的,也就是说,无需真实的机器人训练,只需在计算机上训练就可完成操作。因此,Bauza和她的同事在设计的时候就不用进行复杂的数据收集工作了。
研究人员最初开发了一个框架,模拟给定物体和触觉传感器之间的接触,从而假设机器人可以访问与其交互的物体的数据(例如,物体的三维形状、特征等)。这些接触行为以深度图像的形式呈现,它显示了物体挤压触觉传感器的程度。
随后,Bauza和她的同事们使用最先进的机器学习技术进行计算机视觉和表示学习(representation learning),观察机器人收集的真实触觉数据,并将这些数据与模拟生成的触点数据集进行匹配。
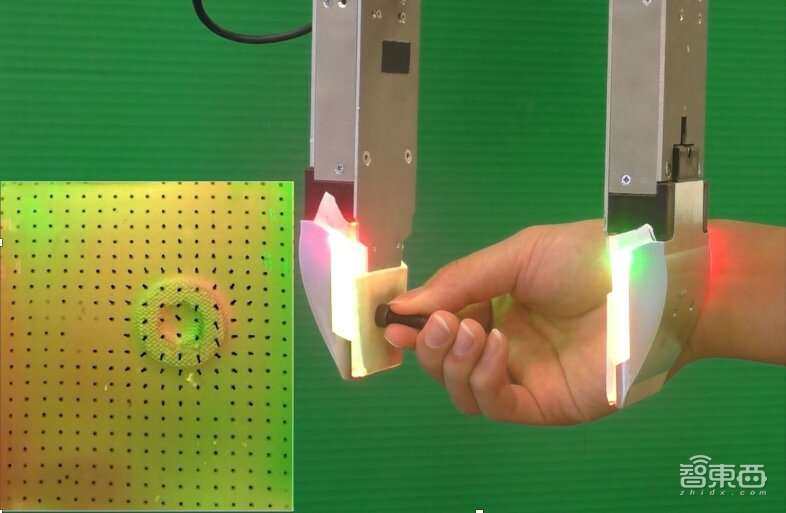 ▲研究人员使用的触觉传感器
▲研究人员使用的触觉传感器
Bauza说:“我们的方法是,将表示为深度图像的接触编码到一个嵌入式空间中,这极大地简化了计算成本,使任务能够实时执行。”
“在我们的工作中,我们在多接触场景中对这一点进行了演示,其中在多个触觉传感器同时接触一个物体的情况下,我们必须将所有观察结果整合到对物体姿态的估计中。”
从本质上讲,这个研究小组设计的方法可以简单基于物体的三维形状来模拟接触信息。因此,它不需要在仔细检查物体时收集任何以前的触觉数据。这使得该技术能够通过机器人的触觉传感器,在它第一次接触到物体时,就对物体产生姿态估计。
Bauza说:“我们意识到触觉传感具有很强的鉴别力,并可以产生高度精确的姿势估计。视觉有时候会受到遮挡的影响,但触觉不会。因此,如果一个机器人接触到一个少见且独特物体的某一部分,那么我们的算法可以轻易识别出机器人接触的物体,从而识别物体的姿态。”
二、“多手指”感触提高操作精度,适用工业领域
许多物体不同侧面的触感相似,而Bauza和她的同事开发的方法可以预测姿势分布,而不止对单个姿态进行估计。这一特征非常特殊,与此前只收集单一姿态估计的目标姿态估计方法形成鲜明对比。此外,麻省理工学院研究小组的框架所预测的分布可以直接与外部信息整合,以进一步减少物体姿态的不确定性。
Bauza说:“值得注意的是,我们还观察到,像用几个手指接触一个物体一样同时进行多个接触行为,可以很大程度上减少对物体姿势判断的不确定性。这证实了我们的预测,即在一个对象上添加接触会限制其姿态并简化姿态检测过程。”
 ▲方法运作流程:接触→ 触觉观察→触觉深度→匹配使用研究人员的最佳算法→结果姿势
▲方法运作流程:接触→ 触觉观察→触觉深度→匹配使用研究人员的最佳算法→结果姿势
为了辅助人类进行日常活动,机器人必须能够高精度、高可靠性地完成任务。由于对物体的操纵意味着机器人需要直接接触物体,因此开发能有效使机器人进行触觉传感的技术至关重要。
另一位参与这一项目的研究人员Alberto Rodriguez在接受媒体采访时说,触觉能力最近受到了工业领域的极大关注,我们通过对三个因素的结合实现了触觉能力技术的突破:
1、 使用具有高分辨率的小型摄像机,捕捉触摸表面变形的状态,这一传感技术成本较低。例如:GelSight 传感。
2、 将上述第一点中提到的传感技术与机器人手指进行结合。例如:GelSlim 手指。
3、 一种基于深度学习的计算框架,它可以有效处理高分辨率触觉图像,实现已知部位的触觉定位。例如:本文提到的研究。
Rodriguez说:“这类技术正在逐渐成熟,行业正在看到自动化任务的价值。比如,在装配自动化领域,触摸任务的实施就对精确度有要求。”
这组研究人员设计的技术,使机器人能实时估计他们正在操纵的物体的姿态,而且精确度很高。这使工作人员有机会对机器人的动作或行为影响做出更准确的预测,从而提高机器人在操作任务中的表现。
这一研究或许能够证明其在工业领域应用中的价值。在工业领域,制造商可以依此根据产品形状的清晰模型组装产品。
未来,研究人员计划扩展他们的框架,使其同时包含有关物体的视觉信息。他们希望将现有的技术转化为一个视觉-触觉传感系统,可以更精准地估计物体的姿态。
此外,他们还将研发让机器人进行精确拾取和放置操作的技术。他们的目标是,让机器人能进行稳定抓取任务的同时,还能帮助其进行感知,提高其触觉定位能力。
结语:为机器人提供更多感官
视觉、音频技术是机器人定位常用的方式,这次,MIT的研究人员从触觉方面为机器人确认物体位置的方式提供了一个新的切口。
人类通过各种感官确认物体的形状和位置,未来,机器人或许也能像人类一样,通过眼睛锁定,耳朵听见,皮肤触摸,鼻子嗅闻来准确锁定物体位置、形状及状态。
来源:Tech Xplore
