








智东西(公众号:zhidxcom)
编 | 林卓玮
智东西11月11日消息,新南威尔士大学的研究团队发明了一种新型缠绕式机械软体抓手,它不仅具有一般FEA驱动软爪的优势,整体轻薄、扁平,同时还克服了传统模型载荷小的技术难题。据称,这款发明有望在一年至一年半内投入商用。
这款缠绕式软抓自重仅8.2g,不仅能够拾取易碎物品,还能抓取最重为1.8kg(自重的220倍)的重物,而且尤其擅长从细长的管道、沟槽中取物。
此外,它的触觉敏感度达到了常规模型的15倍,还具有实时触觉传感能力。
因其在狭小封闭空间的出色表现,这款抓手在工业易碎物品抓取、狭窄空间探测、油气开发、野外勘探、抗险救灾、医疗辅助、下水道建设等方面有着相当广泛的应用前景。

▲机械软爪原型机的抓取能力试验。A-L展示了原型机通过缠绕的方式抓取物体的表现。A:滴灌器;B:马克笔;C:圆柱形电钻头收纳盒;D:塑料三脚架;E:螺丝刀;F:超级胶水瓶;G:锯子;H:锤子;I:柠檬草;J:黄瓜;K:葡萄;L:540mm长试管。M、N、O展示了原型机在封闭空间内抓取马克笔、螺丝刀和金属板手的表现。P、Q、R展示了原型机勾取物体的表现。
一、大幅提升现有软爪载荷和适应性
近年,随着材料科学、化学和工学等学科研究的不断精进和突破,机器人研究领域衍生出了一个新的门类——软体机器人。
相较于传统刚性机器人,软体机器人可以灵活适应周围环境,贴合复杂平面,在保持柔软结构的同时施力、运动、改变物体形状,满足高精确性工作的需求。
其中,一种名为末梢执行器、又称“软爪”的软体机器人被广泛用于人机互动、医疗保健、触觉感知等,成为了相关研究的焦点之一。
11月,来自新南威尔士大学(University of New South Wales, UNSW)的一支研究团队在《先进材料技术(Advanced Material Technologies)》上发表一篇名为《具刚性调节能力和触觉传感功能的仿生高贴合缠绕式柔性材料抓手(Bio-Inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing)》的论文,文中详细说明了该团队的研究成果——新型缠绕式软爪,针对性地解决了软爪存在的通病。
▲《具刚性调节能力和触觉传感功能的仿生高贴合缠绕式柔性材料抓手(Bio-Inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing)》一文发布情况
FEA流体致动器是目前软体机器人研发中应用最为广泛、历史最为悠久的一项驱动技术,基于该技术制成的软爪具有易于制作、成本低、轻巧耐用、冲程大、高能重比的优点。
因此,UNSW研究团队也在发明中应用了这项技术。
然而,基于FEA驱动的软爪常采用类爪或类手结构。由于接触面积不够,这类软爪无法抓握超长、超大、超小、空心球形等特殊尺寸的物品,也无法拾取重物。此外,受形状限制,它也无法在狭小封闭空间内作业。
而且,使用FEA驱动的软爪都有一个通病,那便是载荷较小。
为了解决这一问题,UNSW团队从蟒蛇、象鼻等生物结构中汲取了灵感。
“大象、蟒蛇、章鱼等动物在狩猎或者取食时,会使用柔软的身体部位紧紧地缠住对象,同时不断增大接触面积和稳定性,它们的身体构造在探索、抓取、操纵上有着得天独厚的优势。”研究员Dr. Thanh Nho Do讲到这项发明的灵感来源。
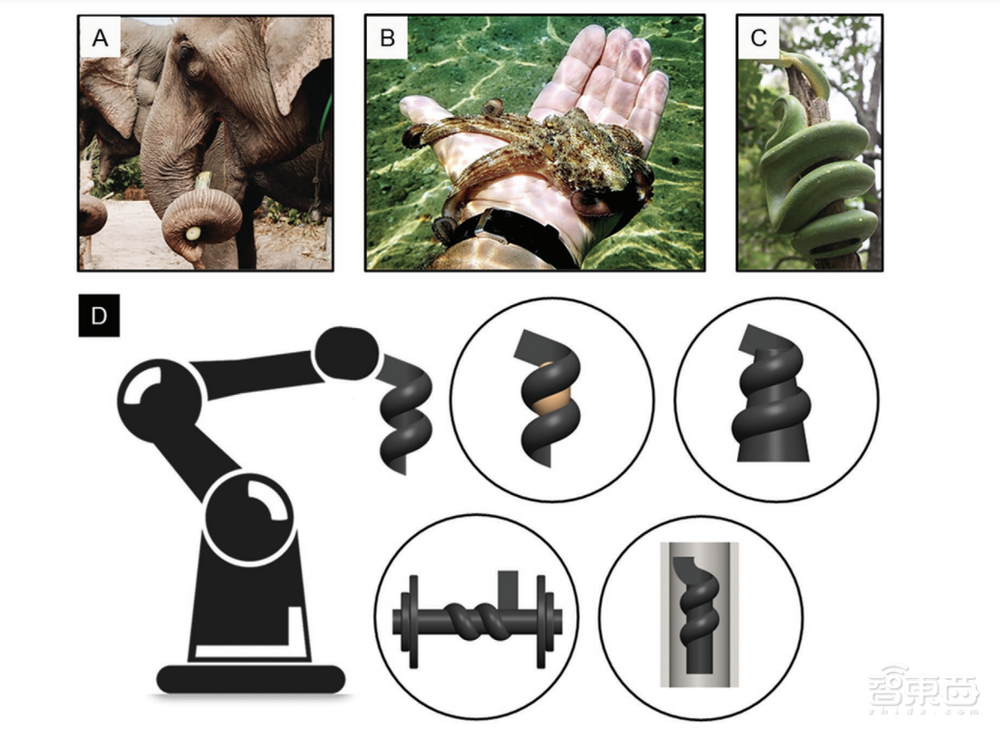
▲新型缠绕式软爪的发明从动物的生理结构汲取灵感
但仅仅使用缠绕式结构还不足以解决载荷小的问题,UNSW团队又引入了由热塑性材料制成的VSS变刚度结构,赋予软爪更强的灵敏度和可塑性。
在设定温度下,仅需短短24秒,软爪便能完成由软到硬、由硬变软的完整调节过程,创下已知调速之最。
实验中,这款“蛇形”软爪原形展现出了惊人的抓握力,重8.2g、长13cm的原形机不仅能够提起超自重200倍的工具盒,还能够缠握住直径达30mm的胶卷。
二、非凡的触觉敏感性
除了载荷小和适应性差的问题,由于欠缺较好的刚性调节和触觉反馈功能,传统软爪在力度控制方面表现平平,无法用于抓握脆弱物体。
引入VSS技术解决了刚性调节问题后,为了提升触觉传感能力,UNSW研究团队将目光投向了传感器技术研究,尤其是EGaIn等新型液体合金材料的应用。
目前,制备液态金属软传感器主要用到的是微通道(microchannel)结构,方法主要是将液态金属直接注入弹性体内部的微通道中。相较于微管(microtubule),这种方法并不能有效发挥材料的优势,而且工艺复杂、费时费力。
这是因为在和微通道排列模式相同的前提下,微管周围的弹性体材料相对较少,在外界力的作用下,能产生较大形变,因此敏感度大于微通道。
因此,UNSW研究团队创造性地将液态金属注入微管中,大幅提升了软爪的延展性和触觉灵敏度。
同时,UNSW团队还为软爪配备了触觉反馈装置,从而更好地掌握力度大小。
目前,Dr. Do已经为这项发明申请了临时专利,同时寻找合作伙伴,希望能在未来一年至一年半内将之投入商用。
他还谈到了这项发明的后续发展:“我们现在想继续优化合成材料,开发闭环控制算法,同时争取将软爪和机械臂相结合,最终做到自主取物。”
Dr. Do对这项技术的前景十分乐观:“一旦成功,未来在抓取大体积重物的时候,就不需要人类操作了,我们还想将软爪和近期推出的触觉手套连接起来,让用户能远程体验抓手工作,同时感受物体形状。”
结语:一个值得期待的研究领域
软体机器人这一年轻的技术方向,在近年来取得了长足的进步。
软体机器人的发展经历了由部分软体到全软体、由有拖缆到无拖缆的转变,从人工操作逐渐向自主运行过渡。
但是,作为一门新兴技术,软体机器人技术发展在动力输出、实际运用等方面还有着许多问题等待着研究者深入探讨。
UNSW研究团队的可喜成果,对于技术研究的整体发展发挥了启示和鼓舞作用。在材料选择、模型构筑、实际运用方面给出了一些解法和思路。
在不远的将来,我们可以期待这项成果正式投入商用,广泛应用于勘探、救援、医疗辅助等领域。
