








车东西(公众号:chedongxi)
文 | Bear
4月19日,由车东西与2019上海车展承办方——上海市国际展览有限公司(SIEC)联合举办的GTIC 2019全球智能汽车供应链创新峰会在2019上海车展同期举办,大会邀请到来自学术界、整车企业、零部件企业、互联网公司、新兴自动驾驶公司和人工智能公司等智能汽车供应链领域的15位嘉宾登台,探讨智能汽车时代的供应链创新与出行变革。
地平线市场拓展与战略规划副总裁李星宇在峰会上发表了《计算未来——新一代自动驾驶芯片带来感知与定位技术新突破》主题演讲。
他认为,如今的汽车产业正朝着软件化的方向发展,汽车正在成为有史以来最复杂的信息产品,为了适配自动驾驶功能与智能化的要求,汽车的电子架构正在以ECU为单位进行着自下而上的重构。
地平线针对自动驾驶汽车推出了“征程”系列自动驾驶芯片,以及基于征程2.0处理器架构的地平线Matrix自动驾驶计算平台,并推出了软硬件一体的解决方案,大大提升了自动驾驶芯片的有效算力。
此外,李星宇还介绍了地平线最新的基于单目摄像头的高精地图解决方案。通过这一方案,地平线以较低成本实现了对高精度地图以小时为单位的更新频率,满足了高等级自动驾驶汽车对实时高精地图要求。
一、汽车电子架构走向集中式 L5级自动驾驶需要1000TOPS算力驱动
开场,李星宇就抛出了一个观点,他认为,汽车正在成为有史以来最复杂的信息产品。
在汽车智能化的浪潮下,汽车电子正在朝着软件化的方向发展,目前,一辆高端智能汽车的软件代码已经达到了2-3亿行,大幅超越了此前的任何一代互联网产品。
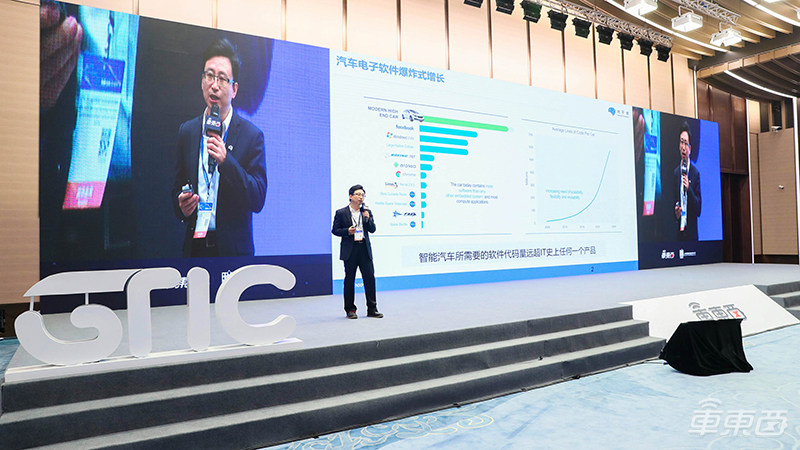
而未来L5级自动驾驶汽车的代码量将可能达到10亿行,其所需要的算力将超过1000TOPS,李星宇将其称之为有史以来最复杂的信息产品。
在过去的20年里,汽车的电子化程度也在逐渐加深。上世纪末,汽车上的MCU数量一般不到10个,而今,智能化汽车的MCU平均数量早已达到了100个以上,高端的智能汽车甚至拥有超过300个MCU。
李星宇表示,智能汽车产业变革的速度是日新月异的,如今汽车数百个MCU的电子架构按照早期分布式,基于CAN、LIN等通信的计算架构已经越来越难以协同。
现在汽车上的每个ECU都有着自己的开发环境,以及不同的计算架构,这些ECU往往是由不同的供应商提供。这样的合作方式使得所有功能的整合效率变得非常低下,难以协同。
李星宇举例说道,哪怕是简单的ACC功能、AEB功能的合并都非常的不容易,因为这两个功能分别来自两家供应商提供的控制器,除非主机厂能够完全理解这两个系统,否则就有可能出现逻辑功能上的碰撞,造成极其严重的后果。
但他认为,随着汽车电子架构的不断发展演进,早期分布式的ECU架构正在朝着中央集中式的EE架构发展。
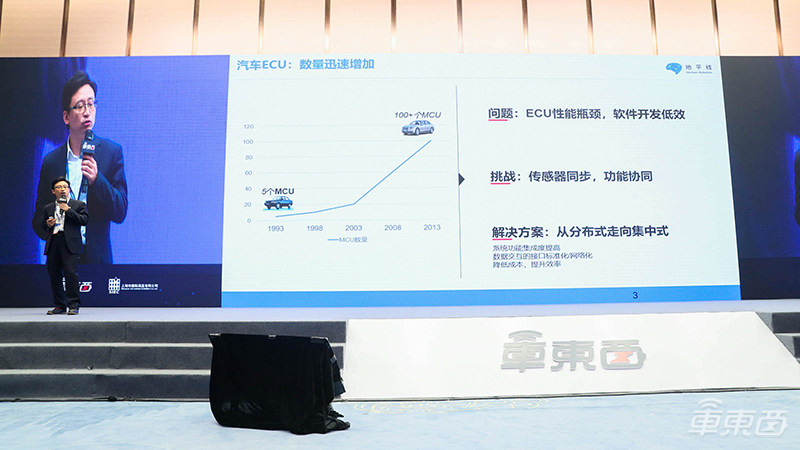
现今,几乎所有的主机厂和Tier1都在讨论域控制器的设计,基于功能划分的域控制器已经实现了相当程度的集中化,动力域、安全域、底盘域等域控制器技术已经趋于成熟。
李星宇表示,如果按照这个趋势发展,总有一天,汽车的电子架构会走向完全融合,即通过一台车载大脑控制汽车的所有功能,到那一天,智能汽车就变成了有着四个轮子的智能计算机与超级数据中心。
二、推自动驾驶芯片与计算平台 Matrix平台获CES创新奖
在这一巨大变革下,汽车ECU的软件开发与计算设计将会发生本质的改变,很可能藉由现在的垂直功能划分转向未来的水平模式——基于不同的功能层对其结构进行划分。李星宇认为,这样的机构将会更加开放,更加高效,将会为无数的应用提供高度一致的开发平台。
但这种改变也对地平线这样这样的芯片公司提出了难题,李星宇以数据量化了这一概念,他表示,如果以自动驾驶的等级作为标准对芯片算力提出要求,那么自动驾驶等级每提升一级,芯片的算力大概需要一个数量级的提升。

而L5级的自动驾驶汽车所需要的算力大概是1000TOPS,这一算力几乎与人脑相当。即是说,汽车要达到完全的自动化,其车载大脑必须要达到人脑的智能水平。
目前,车载的人工智能还停留在感知智能阶段,向后发展,车载人工智能将具备建模、预测、决策等等功能,每一步的前进都将对算力提出巨大的需求,在汽车智能化的浪潮下,其对于算力的要求几乎是一个无法满足的黑洞。
而在芯片算力方面,绝对的算力并不是对一款芯片性能的唯一衡量标准,尽管其可以作为芯片能力的上限提供一个衡量的指标,但真正重要的却是芯片的有效算力。
李星宇表示,这与战时的军力衡量其实是一个道理,炮弹存量的多少只能作为战斗力的一个标准,决定杀伤力的其实是火炮的口径、射速以及火炮的精度,这与芯片的性能如何逻辑相同。
一款芯片算力利用率如何,能源转化为算力的效率如何,计算的成本如何,算力转化为AI输出的效率如何,这些,才是决定有效算力的关键因素。
李星宇用天河二号举例,他指出,天河二号的算力排名世界第一,但其背后的消耗是一年8000万元人民币。对于需要投入商用的L5级自动驾驶汽车来说,如此大的消耗是不合理的,也无法被主机厂和用户所接受。
因此,地平线成立之初就意识到了要以有效算力为优先指标开发芯片,结合场景驱动,硬件与软件结合的理念,该公司在2017年推出了第一代自动驾驶芯片——“征程”1.0芯片。
该系列芯片于2017年6月在台积电完成流片,每秒可以处理30帧1080p的画面,其功耗为1.5W,延时30ms,每帧可识别目标200个。
李星宇表示,今年,地平线将会推出第二代自动驾驶芯片,在第一代的基础上,其效率将会有10倍的提升。
除此之外,地平线还在去年推出了基于征程2.0处理器架构的地平线Matrix自动驾驶计算平台,该平台在今年年初获得了CES 创新奖,地平线也成为了2019年CES车辆智能与自动驾驶技术分类下唯一一家获奖的中国公司。
李星宇还提到了地平线进行感知解决方案研发的策略,他指出,现在传感器的更新换代还比较慢,平均每5年更新一代,但算法的更新却受到摩尔定律的驱动,平均每18个月就更新一代。
在这样的前提下,地平线选择将“感知”解构,先对“知”的层面进行开发,采取这样的策略,当新一代传感器推向市场后,适配的多传感器融合方案也能够很快推出。
三、推出低成本实时高精地图解决方案 采集更新只需一小时
随后,李星宇向到场观众介绍了地平线最新的研究成果——NavNet实时高精度地图解决方案。
他指出,目前市场上大部分高精地图企业的解决方案都是基于激光雷达等一系列传感器实现的,非常精准,但这一解决方案的最大问题就在于高成本。

这一问题使得这些公司的高精地图采集车无法大规模铺开,在采集效率上受到了非常大的限制。未来自动驾驶汽车对于高精地图的依赖程度必然非常高,除了高精地图的准确性,实时更新的效率也非常重要。
而对于传统高精地图供应商来说,整体更新一次的周期可能在一个季度以上,很难满足未来自动驾驶汽车的要求。
针对高精地图采集更新高成本低效率的问题,地平线推出了NavNet实时高精地图的解决方案,这一解决方案仅依靠低成本的单目摄像头就实现了高精度地图的更新以及定位。
低成本的解决方案具备了大规模打入后装及前装市场的条件,一旦将这一方案大规模部署到车辆上,每辆车都能够生成局部的高精地图,再将数据上传到云端,由云端进行汇总、清洗以及梳理的工作,从而生成实时的高精地图传回车辆。
李星宇表示,这一解决方案可在一小时内完成一个区域高精地图的采集与更新。
在地平线的设想中,未来的每辆汽车不光是高精地图的使用者,同时也是高精地图的生成者。
结语:智能汽车的发展需整个汽车产业共同赋能
最后,李星宇表示,自动驾驶产业涉及的深度与广度都是空前的,地平线所能做到的就是提供匹配自动驾驶技术的芯片以及软硬件一体的解决方案,并通过开放的产业链,与合作伙伴之间的衔接变得更加高效。
在这一方面,地平线已经与博世、奥迪、SK等公司达成合作,共同推进商业化项目。
未来,不论是自动驾驶技术对于车外的感知,还是车内人工智能实现的人机交互,都将被整合成为一体化的解决方案。
而这一未来,需要整个汽车产业链的创新作为驱动力,为智能汽车的发展赋能。

